سنسور دور موتور چیست و چگونه کار میکند؟

نویسنده: علیرضا کرامتیان، مدیر مرکز فنی(آموزش و پشتیبانی فنی، گارانتی) و شبکه نمایندگی های خدمات پس از فروش شرکت رنو ایران
سنسور دور موتور یکی از مهمترین سنسورهای خودروهای انژکتوری است. در بعضی مستندات این سنسور را با عناوین دیگری مانند سنسور موقعیت میللنگ (Crankshaft Position Sensor)، سنسور سرعت میللنگ (Crankshaft Speed Sensor)، سنسور فلایویل (Flywheel Sensor) و سنسور TDC (Top Dead Center Sensor) و سنسور زاویه میللنگ (Crankshaft Angle Sensor) نیز نام میبرند.
دو نوع سنسور دور موتور به لحاظ ساختاری وجود دارد:
1- القائی (Inductive)
2- اثر هال (Hall Effect)
سنسور دور موتور با ساختار القائی:
سنسور القائی یک سنسور غیرفعال (Inactive sensor) است، عملکرد این سنسور بدین صورت است که با ایجاد یک میدان مغناطیسی در اطراف خود، اقدام به شناسایی تغییرات محیط اطراف خود مینماید.
در شکل زیر اجزاء یک سنسور القائی به نمایش درآمده است:
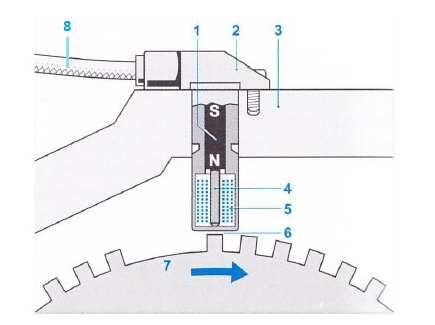
1- آهنربای دائمی (permanent magnet)
2- بدنه سنسور (sensor housing)
3- محل نصب سنسور (cylinder block)
4- هسته آهنی (Iron core)
5- القاگر، سیمپیچ (Inductor, coil)
6- فاصله هوائی (air gap)
7- دندانههای نصب شده بر روی فلایویل (Flywheel with teeth)
8- کابل ارتباطی بین سنسور و کامپیوتر موتور (cable from sensor to engine unit)
همانطور که در شکل مشاهده میشود سنسور، حاوی یک هسته آهنی (4) است که به دور آن یک سیمپیچ و یا سلف (5) پیچیده شده است. انتهای هسته آهنی به یک آهنربای دائمی (1) متصل است. ازآنجاکه هسته آهنی به آهن ربای دائمی متصل است لذا میدان مغناطیسی در نوک هسته آهنی نیز ایجاد میشود و گستره این میدان مغناطیسی تا جائی است که دندانههای روی فلایویل را هم در بر می گیرد، به عبارت دیگر هنگامیکه دندانهها از مقابل سنسور عبور میکنند، در فضائی قرار می گیرند که در آن میدان مغناطیسی وجود دارد و این میدان مغناطیسی در نتیجه وجود آهنربای دائمی که به هسته فلزی متصل است، بوجود آمده است.
بنابر قانون " القاء الکترومغناطبسی فاراده "، هرگاه شار مغناطیسی ای که از مدار بسته ای می گذرد تغییر کند، نیروی محرکه ای در آن القاء می شود که بزرگی آن با آهنگ تغییر شار، متناسب است یعنی هرچه آهنگ تغییر شار مغناطیسی بیشتر باشد، نیروی محرکه القائی و در نتیجه جریان القائی تولید شده در مدار، بیشتر خواهد بود.
بنابر آنچه که گفته شد وقتی فلایویل می چرخد و دندانههای روی فلایویل، از مقابل سنسور عبور میکنند، در سیم پیچی که به دور هسته آهنی پیچیده شده است، شار مغناطیسی تغییر میکند و جریانی در آن ایجاد میشود. شدت شار مغناطیسی ایجاد شده به عوامل زیر بستگی دارد:
1- فاصله هوائی بین نوک سنسور و دندانهها
2- سرعت عبور دندانهها از مقابل سنسور
3- فاصله بین دندانهها
بنابراین، اگر سرعت عبور دندانه های روی فلایویل از مقابل سنسور کم و یا زیاد شود و یا پس از عبور تعدادی قطعه فلزی که ابعاد و طول آنها محاسبه شده باشد، ناگهان یک قطعه فلزی وجود نداشته باشد و یا طول قطعه فلزی و یا فاصله آن تا سنسور، تغییر کند، جریانی که در سنسور القا میشود، تغییر میکند، بدین ترتیب کامپیوتر موتور میتواند با آنالیز و تجزیهوتحلیل این تغییرات، تدابیر لازم را اتخاذ نماید و با استفاده از اطلاعاتی که از سنسورهای دیگر نصب شده بر روی موتور به آن میرسد، کارآئی (Efficiency) موتور را به بالاترین میزان و آلایندگی (Pollution) و مصرف سوخت (Fuel consumption) را به حداقل برساند و در عین خال انتظارات راننده را برآورده کند.

به عبارت دیگر سنسور دور موتور، عمل فیزیکی چرخش میللنگ را اندازهگیری و به یک معادل الکتریکی تبدیل کرده و آن را برای پردازش، به کامپیوتر موتور ارسال میکند. این سیگنالهای الکتریکی که در اختیار کامپیوتر موتور قرار گرفتهاند، بهراحتی و با دقت آنالیز و پردازش میشوند. عملکرد این سنسور بصورتی است که بدون تماس با اجسام فلزی میتواند آنها را تشخیص دهد. از اینرو عواملی مانند اصطکاک و فرسایشات مکانیکی روی طول عمر سنسور اثر ناچیزی دارند. این سنسور میتواند در محیط های آلوده به خاک، روغن و گریس به خوبی کار کنند.
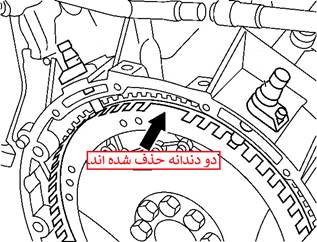
بر روی فلایویل موتور دو ردیف فلز به شکل دندانه وجود دارند. یک ردیف از آنها مربوط به دنده استارت می باشد و ردیف دیگر برای قرارگرفتن در مقابل سنسور دور موتور، طراحی شدهاند. طول و فاصله این دندانهها کاملاً مشخص بوده و با دقت بسیار بالائی نسبت به یکدیگر ساخته شدهاند، بدین ترتیب وقتی این دندانهها از مقابل این سنسور عبور میکنند، جریانی در سنسور القاء میشود. همانطور که گفته شد هرچه سرعت چرخش فلایویل افزایش یابد، این دندانهها با سرعت بیشتری از مقابل سنسور عبور میکند، عبور این دندانهها با سرعت بیشتر از مقابل سنسور، موجب میشود که جریان بیشتری در سنسور القا شود، این جریان به کامپیوتر موتور ارسال میشود و کامپیوتر موتور بدین ترتیب متوجه میشود که سرعت چرخش فلایویل که همان سرعت چرخش میللنگ و یا دور موتور است، چقدر است. برای اینکه کامپیوتر موتور بتواند موقعیت میللنگ را نیز تشخیص دهد و بفهمد که در چه زمانی پیستون های یک و چهار در نقطه مرگ بالا و پیستون های دو و سه در نقطه مرگ پائین هستند، در بعضی خودروها مانند خودروهای پژو، دو دندانه از فلایویل حذف شده اند که در تصویر زیر میتوانید نمونهای از آن را مشاهده نمایید:

و در بعضی خودروهای دیگر مانند خودروهای رنو، تعدادی دندانه حذف و تعدادی دیگر به هم متصل شدهاند (دندانهها پهنتر شدهاند) که تصویری از آنها، در زیر نمایش داده شده است:

وقتی این دو دندانه که حذف شده و یا به هم پیوسته شدهاند، از مقابل سنسور دور موتور عبور میکنند، یک تغییر متفاوت و جدی در ایجاد جریان الکترومغناطیسی بروز مینماید که کامپیوتر موتور با بررسی این تغییر در دامنه سیگنال، میتواند به موقعیت میللنگ پی ببرد. در تصویر فوق میتوانید تصویری از سیگنالهای ارسالی از سمت سنسور به کامپیوتر موتور را مشاهده نمایید.

هنگامیکه قسمتی از فلایویل که دارای دندانه کمتر است، از مقابل سنسور عبور کرده است، تغییر قابل توجهی در میزان جریان تولید شده توسط سنسور ایجاد شده است.
در زیر، تصویری واقعی از سیگنالهای تولید شده توسط سنسور دور موتور قابل مشاهده است:
سنسور دور موتور از نوع القائی توسط دو سیم به کامپیوتر موتور متصل میشود ولی در بعضی خودروها، یک سیم دیگر نیز وجود دارد که به دور دو سیم مذکور پیچیده شده است و وظیفه آن، فقط محافظت از دو سیم دیگر از نویزها و جریانهای الکتریکی مزاحم است، به این سیم، شیلد نیز گفته میشود و به برق منفی یونیت موتور متصل میشود.
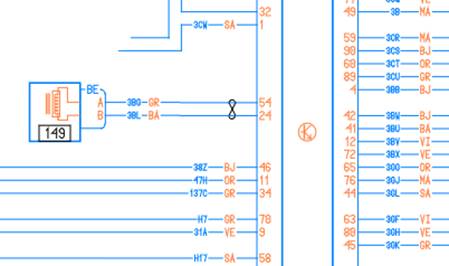
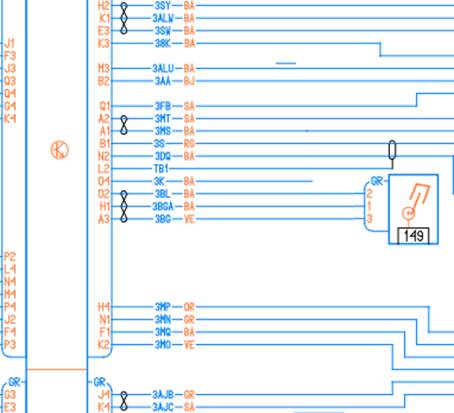
تصویر فوق، قسمتی از نقشه برقی مربوط به سیستم انژکتوری خودرو رنو تندر 90 را نمایش میدهد. سنسور دور موتور، توسط دو سیم به پایه های 54 و 24 کامپیوتر موتور متصل شده است.
سنسور دور موتور با ساختار اثر هال:
بر روی بعضی خودروهای جدید مانند خودرو کپچر و تالیسمان که از تکنولوژی بالاتری بهره میبرند، سنسور دور موتور با ساختار اثر هال (Hall Effect) نصب شده است. این سنسورها را سنسورهای فعال (Active sensor) نیز مینامند. دقت این سنسور بیشتر و میزان خطای سیگنالهایی که از طریق آن به کامپیوتر موتور ارسال میگردد، کمتر است. بدین ترتیب موتور کمتر تحتتأثیر نویزها و سیگنالهای مزاحم قرار گرفته و کارایی آن بیشتر خواهد بود.

در بالا تصویری از یک سنسور دور موتور که بر روی خودرو کپچر نصب است را میتوانید مشاهده فرمایید.
یک سنسور اثر هال برای شروع به کار، نیازمند ولتاژ است. وقتی ولتاژ به این سنسور میرسد، میدان مغناطیسی در آن اعمال شده و فعال میشود. همانطور که میدانیم میدان مغناطیسی دو مشخصه مهم دارد، این دو عبارتاند از چگالی شار مغناطیسی و قطبیت (قطب شمال و جنوب). سیگنال خروجیِ سنسور اثر هال، تابعی از چگالی میدان مغناطیسی اعمال شده به سنسور است. هنگامی که چگالی شار مغناطیسی اطراف سنسور، از میزان مشخصی بیشتر شود، سنسور این موضوع را تشخیص میدهد و یک ولتاژ خروجی به نام ولتاژ هال تولید میکند. این ولتاژ به کامپیوتر ارسال میشود. کامپیوتر با آنالیز و تجزیهوتحلیل این ولتاژ ارسالی و تغییرات موجود در آن و نیز اطلاعات ارسالی از سنسورهای دیگر، متوجه وضعیت سیستم و تغییرات اعمال شده در آن شده و میتواند با اتخاذ تدابیر لازم، موتور را در بهترین وضعیت عملکردی قرار دهد.
سنسور دور موتور با اثر هال، دارای سه سیم می باشند که آنها به کامپیوتر موتور متصل هستند، یکی از آنها، منفی است، سیم دیگر ولتاژ 5+ ولت را به سنسور ارسال میکند و سیم سوم وظیفه دارد تا ولتاژ برگشتی را از سمت سنسور به کامپیوتر موتور بفرستد.
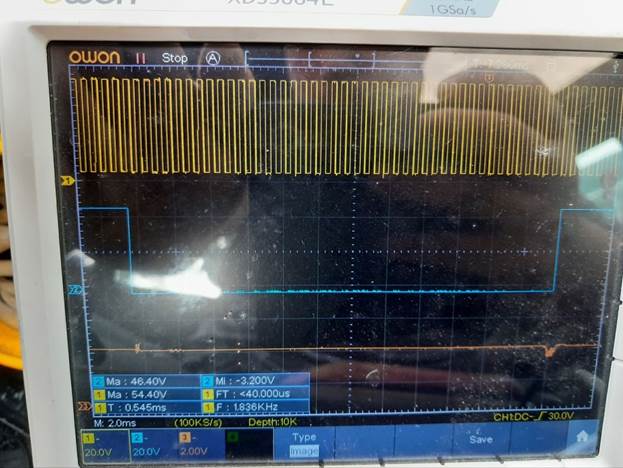
سیگنال ارسال شده از سنسور دور موتور با ساختار اثر هال، بهصورت موج مربعی است که در شکل زیر نمایش داده شده است:

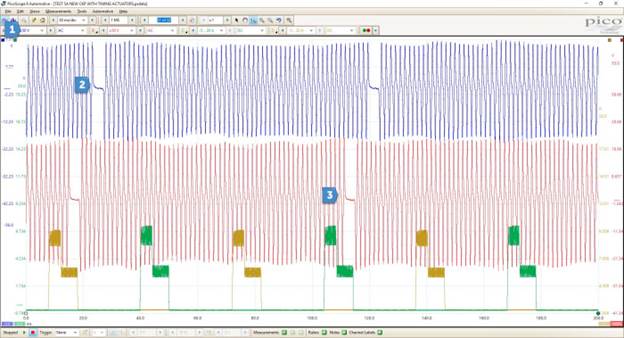
در زیر تصویری واقعیتر از سیگنالهای ایجاد شده توسط سنسور دور موتور با ساختار اثر هال قابل مشاهده است:
در زیر نقشه برقی کامپیوتر موتور خودرو کپچر، قابل مشاهده است:
کامپیوتر موتور، برق 5+ ولت را به پایه شماره یک سنسور می رساند، پایه شماره سه، منفی است و پایه شماره دو، سیگنال بازگشتی را به یونیت موتور ارسال مینماید.
تشخیص جرقه ناقص:
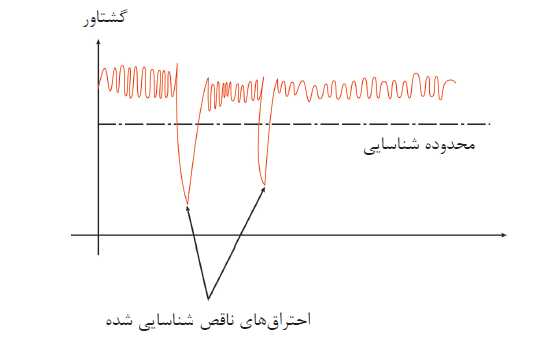
احتراق ناقص (Misfire) نتیجه یک احتراق، با وضعیت ضعیف در یک یا چند سیلندر است. این احتراق ناقص با استفاده از آنالیز نمودن گشتاور موتور و از طریق سنسور دور موتور، شناسایی میشود.
در زیر نحوه آنالیز سیگنالهای ارسالی توسط سنسور دور موتور که منجر به تشخیص احتراق ناقص (Misfire) میشود، نمایش داده شده است.
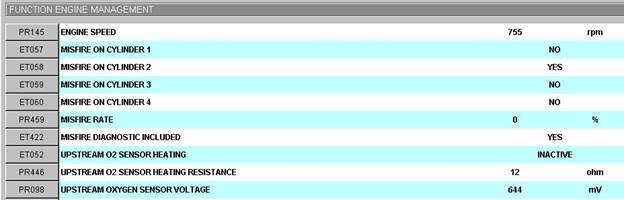
در شکل زیر تصویری از صفحه پارامترها و استاتوسهای دستگاه عیبیاب خودرو تندر، نمایش داده شده است که نشان میدهد سیلندر شماره دو دارای احتراق ناقص است.
تشخیص کوبش، ضربه و یا ناک (knock) در سیلندر:
وجود کوبش، ضربه و یا ناک در موتور توسط سنسور ناک تشخیص داده میشود. این سنسور بر روی بلوک سیلندر و معمولاً مابین سیلندر دو و سه نصب میشود. اما این سنسور نمی تواند تشخیص دهد که کوبش، ضربه و یا ناک، در کدام سیلندر اتفاق افتاده است، در اینجا سوالی مطرح می شود که اگر سنسور ناک فقط می تواند وجود ناک را در بلوک سیلندر، تشخیص دهد، پس کامپیوتر موتور چگونه می تواند تشخیص دهد که ناک در کدام سیلندر و یا سیلندرها، اتفاق افتاده است.
پاسخ این است که کامپیوتر موتور، با آنالیز و تجزیهوتحلیل اطلاعات دریافتی از سنسور دور موتور، میتواند تشخیص دهد که در کدام سیلندر و یا سیلندرها، پدیده کوبش و یا ناک ایجاد شده است. کامپیوتر موتور وضعیت اطلاعات ارسالی از سنسور دور موتور را بررسی میکند و چنانچه یک احتراقِ زودتر از موعد و یا احتراق به مراتب قویتر را حس نماید، به وجود ناک در آن سیلندر و یا سیلندرها پی میبرد.
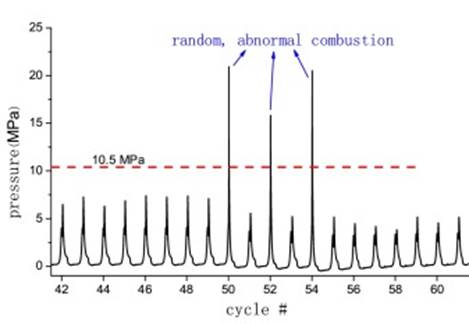
در تصویر فوق، احتراقهای غیرطبیعی به نمایش درآمده اند که منجر به ایجاد فشار بسیار زیادی در اتاقک احتراق و ضربه به پیستون خواهند شد. مطابق بررسی انجام شده بر روی یک موتور، یک احتراق نرمال فشاری مابین 6 الی 7 مگاپاسکال ایجاد مینماید و این در حالی است که فشار حاصله از یک احتراق غیرطبیعی که باعث وجود ضربه و یا ناک شده است، فشاری مابین 17 تا 22 مگاپاسکال ایجاد کرده است که میتواند به شدت به قطعات موتور آسیب وارد نماید.
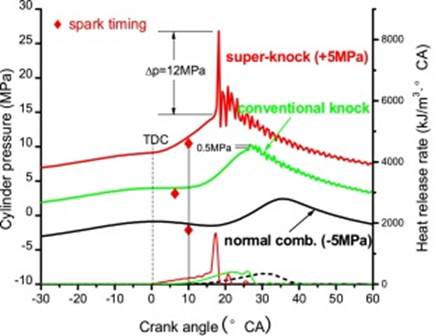
در تصویر فوق، نمودار یک احتراق نرمال و مناسب با رنگ سیاه نمایش داده شده است، به حداکثر میزان تولید فشار در سیلندر که توسط احتراق ایجاد شده است و حداکثر میزان انرژی آزاد شده در آن و موقعیت (زاویه) میللنگ که در آن احتراق انجام شده است، دقت نمایید. نمودار سبزرنگ، نشان دهنده یک ناک معمولی (Conventional Knock) و یا غیرمُخرب است، در این وضعیت هم مقدار تولید فشار، در سیلندر و هم انرژی آزاد شده در آن نسبت به یک احتراق نرمال، بیشتر است و همچنین احتراق زودتر از زمان مقرر انجام شده است.
در این نمودار، ناک بسیار قوی (Super Knock) و یا مُخرب، با رنگ قرمز مشخص شده است که حداکثر فشار تولید شده در سیلندر که توسط احتراق ایجاد شده است، نسبت به دو وضعیت قبلی بیشتر باشد، همچنین حداکثر مقدار انرژی آزاد شده در آن، از دو حالت قبلی بیشتر است. در این حالت، احتراق نسبت به دو حالت قبلی نیز زودتر انجام گرفته است.
روش تست عملکرد سنسور دور موتور:
سنسورهای دور موتور از نوع القائی را میتوان بهوسیله اهممتر تست کرد. از آنجاکه این سنسورها دارای یک سلف می باشند، میتوان با اندازهگیری مقاومت سیمپیچ آنها، اندازهگیری و بهوسیله مقایسه با مقدار مرجع، در خصوص سالم بودن سنسور، اظهار نظر نمود. به طور مثال مقاومت سنسور دور موتور خودروهای تندر، پراید، پژو 405 و 206، در حدود 400 اهم می باشد.

این سنسورها را همچنین بهوسیله ولتمتر نیز میتوان تست نمود ولی مقادیر مرجعی برای آن وجود ندارد و فقط میتوان فهمید که این سنسور جریان الکتریسیته تولید میکند و یا خیر.

کنترل سالم بودن سنسور دور موتور از نوع اثر هال بهوسیله اهممتر قابل انجام نمیباشد زیرا همانطور که گفته شد در این سنسورها سیمپیچ وجود ندارد. کنترل این سنسورها بهوسیله اهممتر ممکن است به آنها آسیب برساند.
ایراد در دندانههای فلایویل:
آسیبدیدگی دندانههای روی فلایویل که مربوط به سنسور دور موتور هستند، ممکن است موجب اختلال در عملکرد موتور شود که عملیات عیبیابی را دشوار می نماید.

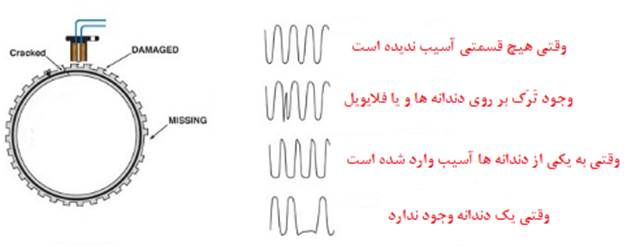
تصویر فوق، یک شبیهساز است تا ولتاژ خروجی از یک سنسور القائی دور موتور را بهتر نمایش دهد، وجود تَرک، ضربه، آسیبدیدگی و یا حتی پلیسههای فلزی و زنگ زدگی در قسمتهای مختلف فلایویل، میتواند در ولتاژ تولید شده توسط سنسور، اختلال ایجاد نماید و موجب شود تا کامپیوتر موتور، در آنالیز و تجزیهوتحلیل اطلاعات دریافتی دچار مشکل گردد که پیامد آن، بدکارکردن موتور(ریپ زدن) می باشد. تصاویر زیر نشان دهنده دلایل بروز ایراد است:
ممکن است فلایویل از قسمت وسط یعنی محلی که بر روی میللنگ، بهوسیله پیچ متصل میشود، آسیبدیده و یا دچار تَرک خوردگی شده باشد که در این صورت امکان دارد تا کامپیوتر موتور با آنالیز و تجزیهوتحلیل اطلاعات دریافتی از سنسور دور موتور و مقایسه آنها با الگوریتمهای مرجع، به این نتیجه برسد که اگر دستور ایجاد جرقه و پاشش سوخت را صادر نماید، موتور دچار آسیبدیدگی شود لذا اجازه روشن شدن موتور را صادر نمیکند و یا ممکن است کامپیوتر موتور، اجازه روشن شدن موتور را صادر کند ولی دور موتور از حدی بالاتر نرود که در چنین مواردی اصطلاحا گفته می شود که موتور گاز نمی خورد. به تصویر زیر دقت نمایید.

وجود تَرک در قسمت وسط فلایویل کاملاً مشخص است. همانطور که گفته شد بروز چنین مواردی موجب اختلال شدید در عملکرد موتور میگردد.
بنابر آنچه گفته شد میتوان چنین نتیجه گرفت که تشخیص اینکه سنسور دور موتور خراب است و یا فلایویل و یا دندانه های روی آن، منشا ایراد می باشند، ممکن است با توجه به امکانات موجود در یک تعمیرگاه دشوار باشد و امکان دارد تست سنسور دور موتور، به تنهائی کارساز نباشد لذا بهتر است که کارشناس بعد از اینکه قطعات را بصورت جدا تست نمود و به نتیجه ای نرسید، اقدام به استفاده از تجربه نموده و با آنالیز و تجزیهوتحلیل مقادیر پارامترها و استاتوس ها که توسط دستگاه عیبیاب نمایش داده میشوند و همچنین با تفسیر آنها، منشأ ایراد را حدس بزند.
نتیجهگیری:
سنسور دور موتور یکی از مهمترین قطعات سیستم انژکتور موتور است که اطلاعات بسیار ارزشمندی را به کامپیوتر موتور ارسال میکند. کامپیوتر موتور با استفاده از این اطلاعات و همچنین با بهره گیری از آنچه که از سنسورهای دیگر دریافت می کند، اقدام به آنالیز و تجزیهوتحلیل آنها نموده و میزان پاشش و زمان جرقه را طوری تنظیم می نماید تا علاوه بر اینکه موتور با بالاترین بهره وری کار کند و درخواست های صاحب خودرو برآورده شود، حداقل آسیب به موتور وارد شده و میزان استهلاک موتور به کمترین میزان برسد.
What is Engine Speed Sensor and how does it work?
Writer: Alireza Keramatian/ Renault IRAN Technical Hub and Network Manager